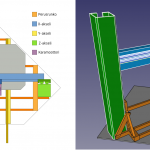
Trapetsiruuvit CNC:n pystyakselille
Uuden CNC-jyrsimen X- ja Y-suuntien lineaariyksiköissä on jo valmiiksi käyttöön sopivat kuularuuvit. Sen sijaan Z-akselin lineaariyksiköissä on suora hihnaveto, joka ei ole riittävän vahva jyrsinkäyttöön. Suunnitelma Tarkoitus on korvata hihnaveto … Lue lisää