Yhteismuotoiset häiriöt ja maalenkit
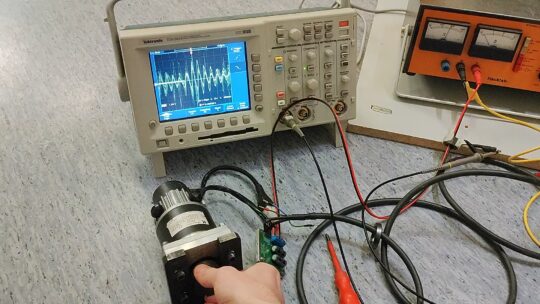
Omatekoisen moottoriohjaimen kakkosversio oli menestys, ainakin kotipöydällä testattuna. Mutta kun kytkin sen kiinni varsinaiseen ohjaus-PC:hen, ilmestyi jostain sähköisiä häiriöpulsseja sotkemaan koko homman. Selvittelyn jälkeen syyksi paljastui pieni puute maadoituksessa ja … Lue lisää