Toimiakseen CNC-jyrsimenä, robokäsi tarvitsee jyrsinkaran eli terää pyörittävän moottorin kouraansa. Tässä on mielenkiintoinen tasapainottelu monen tekijän välillä:
- Liian painava kara ylikuormittaisi robottikäden. Maksimipaino on 3 kg, mutta jo se luultavasti heikentää tarkkuutta painovoiman vääntäessä rakenteita.
- Heikkotehoinen moottori pakottaa jyrsimään hyvin ohuissa kerroksissa, moninkertaistaen jyrsintöihin kuluvan ajan. Tehoa olisi hyvä olla vähintään muutama sata wattia.
- Fyysisesti liian iso moottori rajoittaa pääsyä ahtaisiin rakoihin.
- Liian pieni kierrosluku estää käyttämästä pieniä teriä. Esimerkiksi piirilevyjen jyrsintään 0.3mm terillä olisi hyvä saada kierroksia vähintään 20kRPM.
- Liian pieni vääntömomentti estää käyttämästä isoja teriä, joilla saa nopeammin isoja upotuksia leikattua. Esimerkiksi 3mm terälle alumiinissa riittää 0.02 Nm, mutta 6mm terällä optimi olisi jo 0.3 Nm.
- Ilmajäähdytteiset moottorit ovat äänekkäitä ja ylikuumenevat herkästi.
- Liian pienet laakerit eivät siedä jyrsinnässä tulevia kuormia, vaan kuluvat ennenaikaisesti ja vaativat usein vaihtamista.
Onneksi nykyään on saatavilla laaja valikoima harjattomia DC-moottoreita eli BLDC-moottoreita. Ne ovat teknisesti kolmivaihemoottoreita, joissa käämit pysyvät paikallaan ja joko käämien sisällä tai ympärillä pyörii kestomagneetti. Edistyneemmillä ohjausmenetelmillä kuten FOC saavutetaan hyvä vääntö laajalla kierroslukualueella, eli moottorin nopeutta voi pudottaa ohjelmallisesti ilman että vääntö pienenee. Tämä on usein tarpeen muoveja jyrsittäessä, ne kun tuppaavat sulamaan liian isolla kierrosnopeudella.

BLDC-moottoreita ajetaan nopeudensäätimellä eli ESC:llä. ESC:ssä on yleensä kuusi fettiä, joilla se pätkii eri käämeihin meneviä jännitteitä sopivan magneettikentän saavuttamiseksi. Samalla se toimii hakkurimuuntimena jännitteelle, eli esimerkiksi 48V/10A syötöstä saadaan moottorille vaikkapa 12V/40A. Suoraan 40A syötön kuljettamiseen tarvittaisiin paksut johdot virtalähteeltä asti, mutta ESC:n kanssa paksut johtimet tarvitaan vain muutaman sentin matkalle piirilevyltä moottorille.
Olen jo muutaman vuoden ajan käyttänyt omissa sähköpyörävirityksissä avoimen lähdekoodin VESC-nopeussäädintä, jossa on FOC-ohjaus. Se jaksaa ajaa satojen wattien tehoa, ja enimmillään 50 ampeerin jatkuvaa virtaa. eBaysta löytyy hieman jatkokehitettyjä FS-ESC malleja, jotka käyttävät samaa softaa. VESC:iä voi ohjata suoraan sarjaporttikomennoilla, ja vaikuttaisi että ROS:lle löytyy pari valmistakin kommunikointitoteutusta.
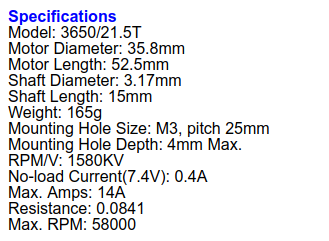
BLDC-moottorien spekseissä olennaisimmat parametrit ovat KV-luku ja käämien resistanssi. KV-luku tarkoittaa RPM/volt -suhdetta, eli esimerkiksi KV=1580 moottori pyörisi 10 voltin jännitteellä 15 800 kierrosta minuutissa. Tämä on maksiminopeus, nopeussäädin voi pyörittää moottoria hitaamminkin. Käämien resistanssi puolestaan määrää paljonko hukkalämpöä milläkin virralla syntyy. Esimerkiksi 0.08 ohmin käämeissä 40 ampeerin virralla syntyy 32 W lämpöä. Maksimivirta määräytyy hukkatehon ja jäähdytyskapasiteetin mukaan. Spekseissä olevat maksimivirrat vaihtelevat villisti, koska esim. RC-autossa jäähdytys on paljon vähäisempi kuin lentävässä tuulettimessa.
Moottorien spekseissä ei yleensä kerrota juuri mitään vääntömomentista. Sen voi kuitenkin johtaa KV-luvusta, ja tuloksena on T = 8 * I / KV, missä T on vääntö Newton-metreissä ja I on virta ampeereissa. Esimerkkimoottorilla 40 ampeerin virralla saataisiin siis 0.20 Nm vääntö.
Jyrsinnässä on kaksi kriittistä parametria: kierrosluku ja syöttönopeus, eli englanniksi speed ja feed. Nämä määräävät kuinka paksun siivun materiaalia terän reuna aina kerrallaan vuolee, ja kuinka nopeasti tämä reuna liikkuu. Optimaaliset arvot riippuvat materiaalista, ja niitä voi laskea esim. FSWizard-laskurilla. Erinomaista on, mikäli CNC-jyrsin toimii hyvin laajalla nopeusalueella jotta joka tilanteessa löytyy hyvä vaihtoehto. Käytännössä mekaniikan jäykkyys ja karamoottorin teho rajoittavat tätä, ja vaativat kompromisseja myös leikkuusyvyyden kanssa. Robokädessä on hyvin mahdollisuuksia isoihinkin syöttönopeuksiin, mutta jäykkyys ei ole niin hyvä kuin jyrsimeksi suunnitellussa laitteessa.
Isoissa jyrsinkoneissa karan laakerointi on hyvinkin massiivinen, koska leikkuuvoimat kasvavat niin isoiksi. Kun meidän robokätemme ei jaksa yli 30 Newtonin voimia muutenkaan, riittävät karalle aika pienetkin laakerit. Helpointa on hyödyntää suoraan moottorin laakereita. Ne ovat varsin hyvät sivusuuntaisille voimille, mutta akselin suuntaiset ”porausvoimat” lisäävät kulumista. Jyrsinterätkään eivät kuitenkaan leikkaa poraussuunnassa kovin hyvin, joten suurin osa työstöstä tehdään sivusuunnassa jos mahdollista.
Moottorin akselin laakeroinnin lisäksi on tärkeää, että jyrsinterä on tarkasti keskellä ja tukevasti kiinni akselin päässä. Usein tähän käytetään ER-sarjan monitahoisia istukoita, jotka hoitavatkin homman erinomaisesti. Harmillisesti sarjan pieninkin ER11-istukka on halkaisijaltaan 20 mm, mikä on aika massiivinen 3 mm jyrsinterään verrattuna ja tulee jyrsiessä ajoittain tielle. eBaysta saa myös Dremel-tyylisiä kolmileukaisia istukoita, jotka muistuttavat minikokoista porakoneen istukkaa. Päätin että tämä on kokeilemisen arvoinen, vaikka epäilyttääkin mahtaako se pitää terää riittävän hyvin.
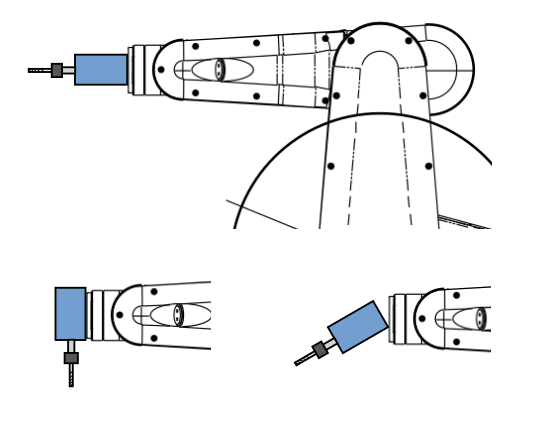
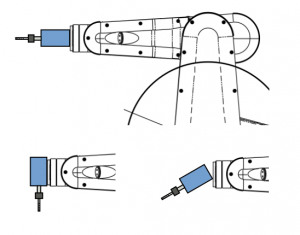
Ei ole selvää mihin asentoon moottori kannattaa asentaa robottikäteen. Intuitio sanoisi, ettei sitä kannata laittaa osoittamaan suoraan eteenpäin kiinnityslevystä, koska tällöin rannemoottorin pyörityksellä ei olisi mitään merkitystä. Toisaalta jos moottori osoittaisi 90 asteen kulmassa sivulle, tulisi ranteen mekaniikka varsin lähelle jyrsittävää kappaletta ja voisi olla tiellä. Päädyin siihen että paras lienee laittaa se jotenkin vinoon.
Alustavaksi mekaniikaksi jyrsin omalla CNC3020-jyrsimelläni alumiinista palikan, jossa moottori on 15 asteen kulmassa. Tämä oli isoin kulma johon sain sen soviteltua niin, että palikan robokäteen kiinnittävät neljä kuusiokoloruuvia nurkissa ovat vielä avattavissa ilman koko homman purkamista.

Tarkoitus on laittaa vesijäähdytysputki kulkemaan alumiinipalikan läpi parista reiästä, jolloin se samalla jäähdyttää myös palikan kylkeen pultattavan nopeussäätimen. Myös moottorin yläosan ympäri voisi kiertää muutaman kierroksen ohutta kupariputkea. Tuohon sitten eBay-special istukka kiinni ja eikun kokeilemaan.
Tässä on niin paljon arvailujen varassa, että päätin lähteä liikkeelle halvemman pään moottorilla ja muilla osilla. Sitten kun näistä on kokemusta kertynyt ja tietää ongelmakohdat, voi päivittää tarpeelliset osat jykevämpiin.